General matrix notation of a VAR(p)
This page just shows the details for different matrix notations of a VAR(p) process with k variables.
Contents |
Var(p)
Main article: Vector autoregression

Where each  is a k x 1 vector and each
is a k x 1 vector and each  is a k x k matrix.
is a k x k matrix.
Large matrix notation

Equation by equation notation
Rewriting the y variables one to one gives:




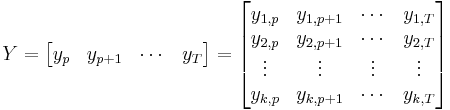
Concise matrix notation
One can rewrite a VAR(p) with k variables in a general way which includes T+1 observations  through
through 

Where:

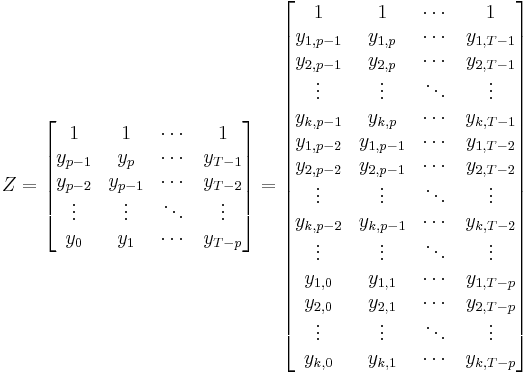
and
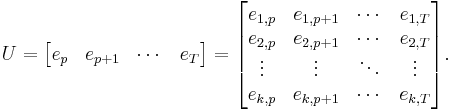
One can then solve for the coefficient matrix B (e.g. using an ordinary least squares estimation of  )
)
References
- Helmut Lütkepohl. New Introduction to Multiple Time Series Analysis. Springer. 2005.